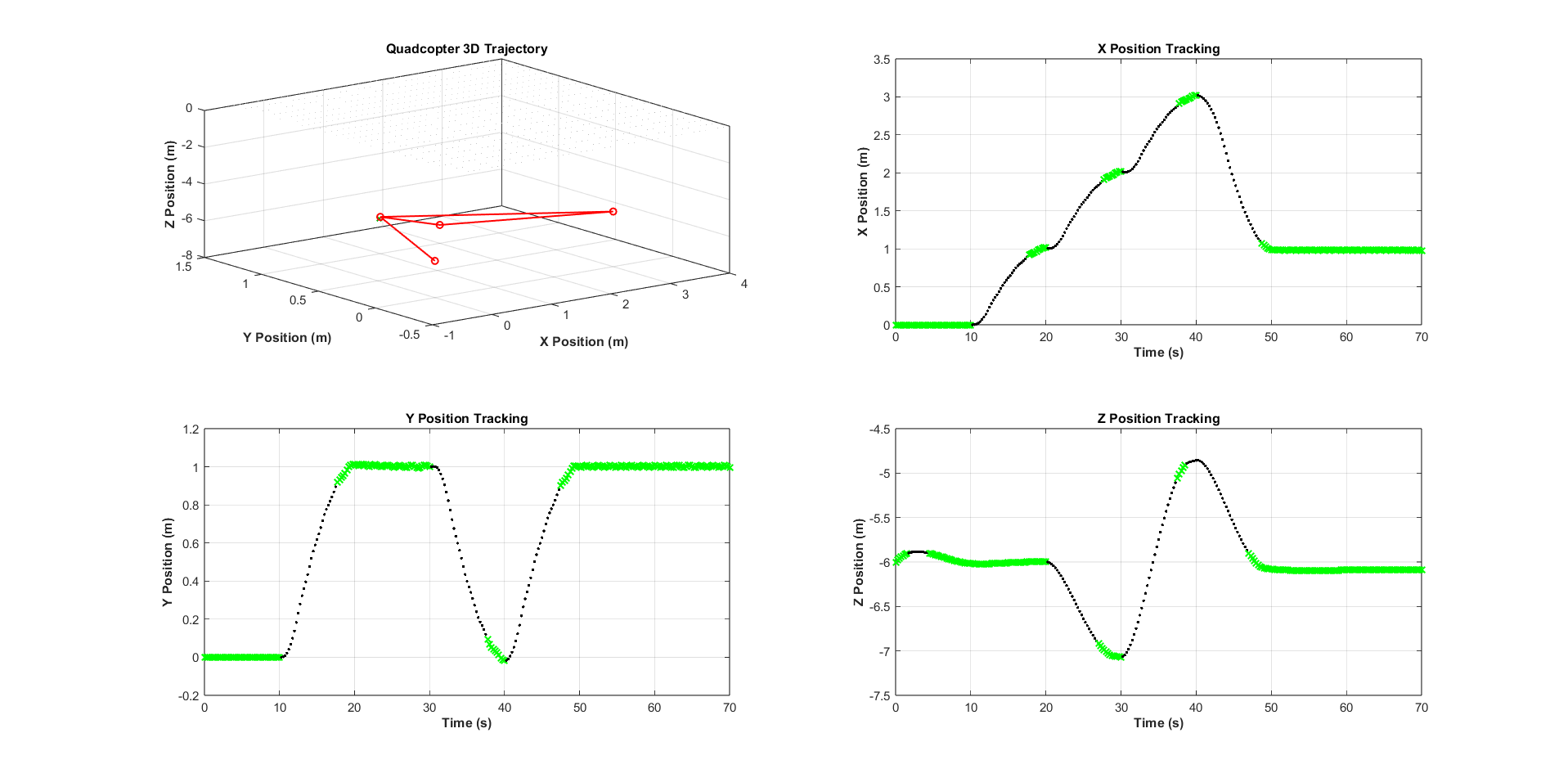
Quadcopter simulation As a school project me and my team received a mathematical model depicting a quadcopter, we designed a
full state observer regulation and I programmed it in a
MATLAB simulation including a visualisation of the path it took through the predetermined points.

Tech: MATLAB, State Regulation
Links:
MATLAB code Lessons learned:
- Implemented a regulator for the first time and really understood the concepts
- Regulating in discrete time intervals
Description:
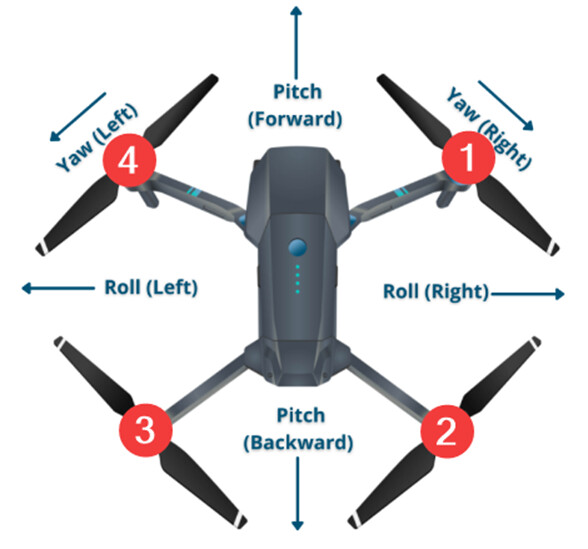
A quadcopter has 3 torques and 1 thrust that I need to regulate to keep in check 3 angles and 3
axis that the quadcopter moves in. The thrust represents how quickly the 4 motors spin and the
torques is represented by the rotation of the quadcopter so it can move not only up and down,
but also sideways.
All of these things can be found on the real quadcopter as well
as my simulation. The only thing omitted from my simulation were external influences like wind.
As for the regulation, the only way to regulate using a state based regulation like the observer
is to have the quadcopter in a mode where the angles are really small (because then we can say
that sines of angles are equal to the angles themselves). Then it was only a matter of
regulating the thrust and calculating the required angles from the x and y axis differences.
It was a really interesting challenge that made things click for me in terms of real
regulation.