SPIDERBOT 
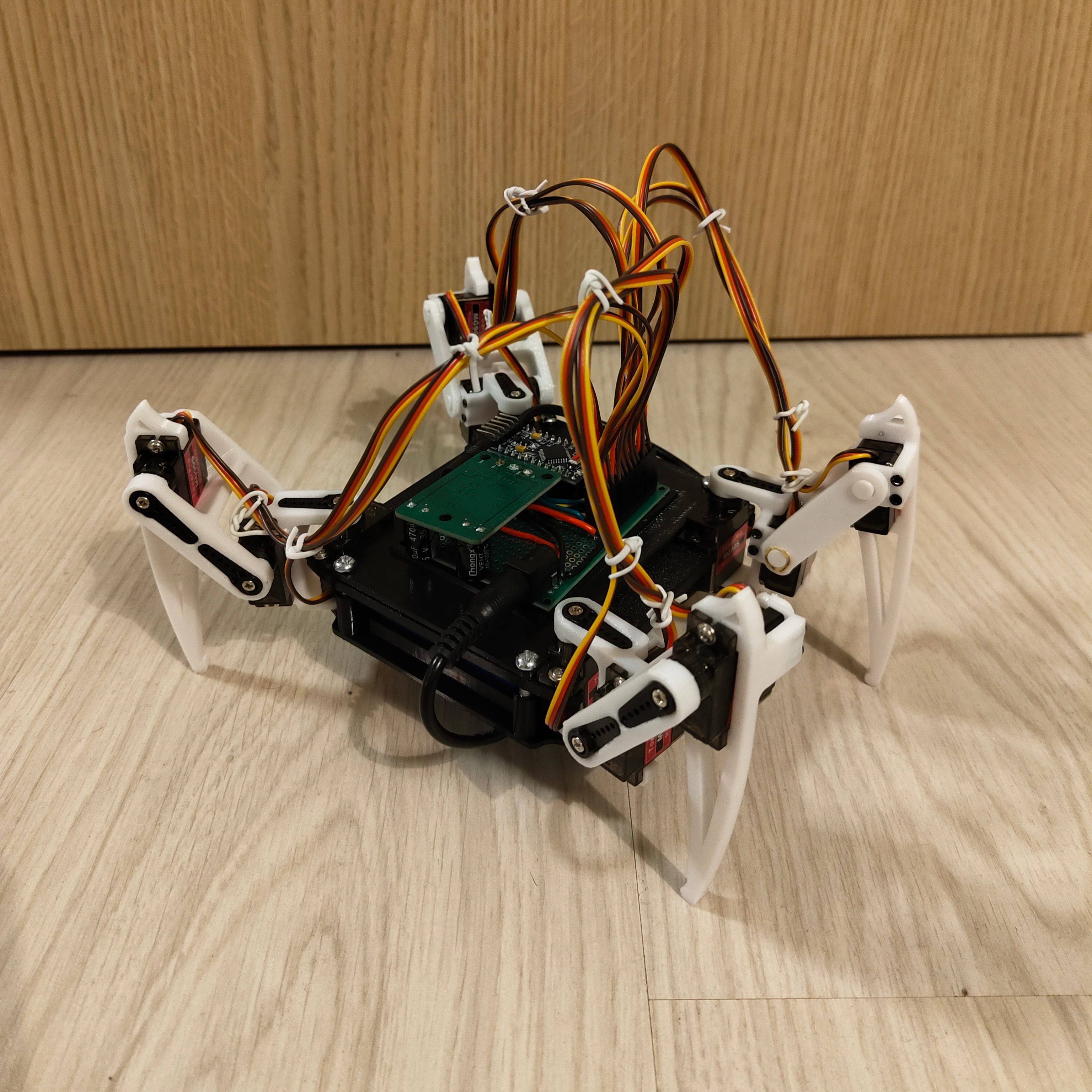
This robot uses an Arduino Pro and runs off a 12.6V Li-Ion battery. It has 12 servos in it's legs which allow it to move, wave it's little hand and dance!
Tech: Embedded systems, Arduino, Li-Ion battery
This robot uses an Arduino Pro and runs off a 12.6V Li-Ion battery. It has 12 servos in it's legs which allow it to move, wave it's little hand and dance!
Tech: Embedded systems, Arduino, Li-Ion battery
I have always been fascinated by spider-robots so I made my own. Creating this involved making my own circuit on a perfboard, 3D printing all the parts and putting it all together with a good controlling algorithm. The spiderbot has 4 legs which have a total of 12 servos inside them.
The circuit starts with a 12.6V Li-Ion battery which goes into a DC/DC voltage converter to convert it to 5 Volts. These 5 Volts go into the Arduino Pro board and into the 12 MG90S servos. The arduino controls the servos using PWM through it's digital pins.
The Arduino C++ code uses the Servo.h library to control the servos (handles the PWM signal generation) and FlexiTimer2 to move smoothly between position interpolation logic.
This is my only project here which is not yet finished.